Results
Graph Conditional Generation
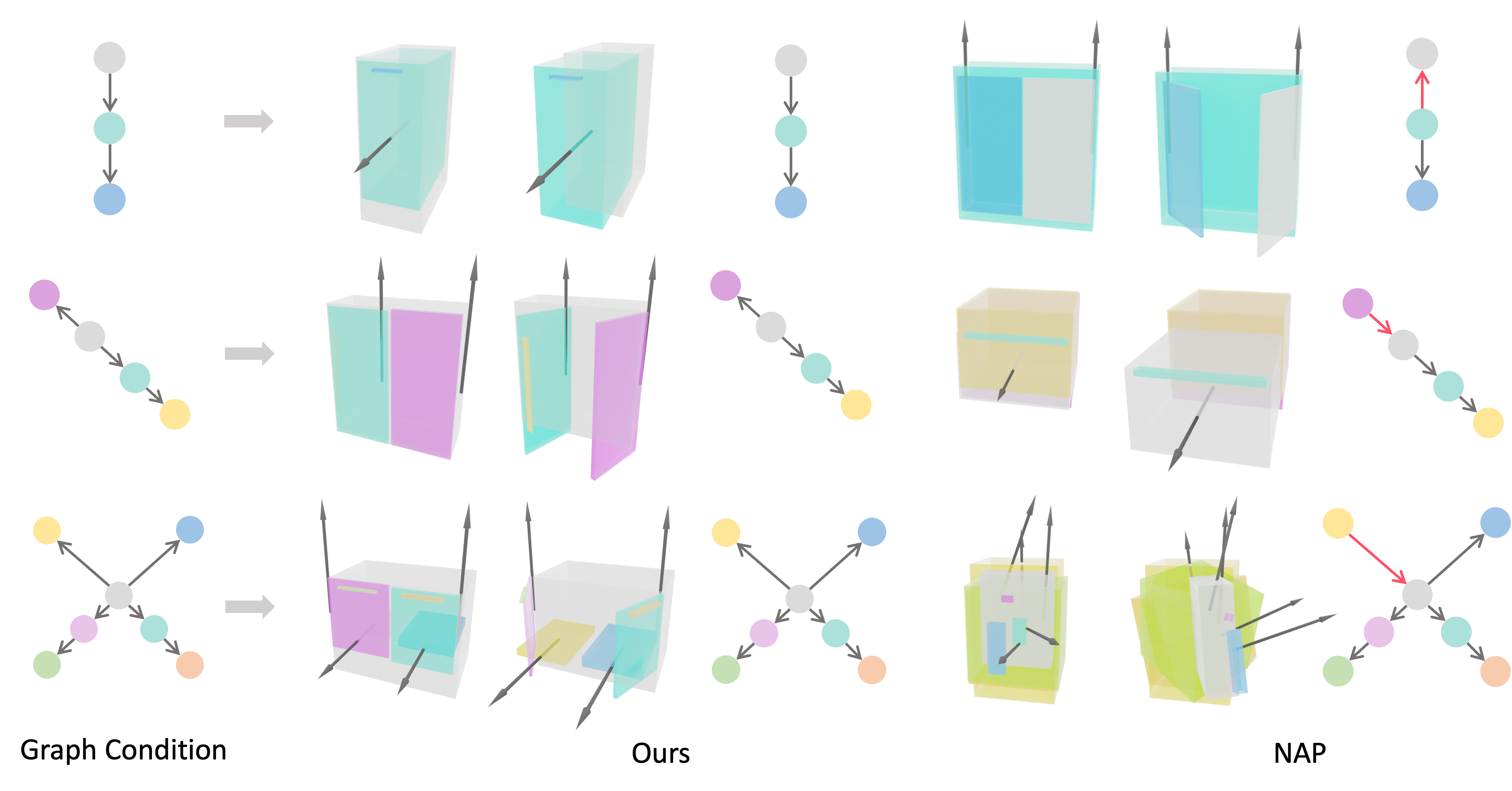
Here we show qualitative examples of generated objects conditioned on graphs of varied complexity. Our generated objects respect the node hierarchy with parts better matching the input graph as denoted by the color. In comparison, prior work (NAP) fails to conform to the input graph with inconsistent part assignments and flipped or disordered connections between parts, denoted using red arrows.
OOD Graph Conditional Generation
Our method can be conditioned on graphs that are out of the distribution of the training samples. These results illustrate that our method can generate plausible objects even for unseen graphs with different numbers and compositions of parts.
Part → Motion
Our method can be conditioned on specific attributes associated with the graph. Here, we predict part articulation parameters given a bounding box condition for each part. The output plausibly completes the object given the provided input parts.
Type → Part
We show various possible completions by conditioning on specific joint types for each node in the input graph.
Axis → Part
We show various possible completions conditioning on a specific articulation axis for each part.